|
|
|
|
|
|

ロボットシステム導入の流れ
1.引き合い
事例などを参考に、導入目的や費用体効果の可否など具体的なイメージ、費用やスケジュールといった検討項目を洗い出し、構想、提案書にまとめる為にヒアリングを行います。
2.企画構想
現場調査やヒアリングを通して、システムの企画構想を実施、自動化目的やシステム概要などがを明確にして、導入目的や実現方法、想定運用などをまとめ、見積仕様書を作成、作業工程やスケジュールなどを決定するための正式見積もりを作成、ご提示します。
3.仕様定義
運用イメージや作業内容などを検討する為の3Dデータやロボットシミュレーションにて、具体的な運用イメージを提示、導入プロジェクトの進め方、運用におけるチェックポイント・処理方法などのすり合わせをします。この段階でシステムの全体像が明確になり、必要に応じて見積もりの修正を行います。この段階でプロジェクト進める為に、ご契約が必要になります。
4.基本設計から詳細設計
具体的なロボットシステムの方式や詳細の設計を行い、インテグレーとするロボットや必要部品の調達リストを作成、自動化にかかわるリスクを確認し、安全対策について設計に反映します。詳細設計では、基本設計をもとにロボットや部品を確定し、ロボットや部品を調達します。また出荷前テストの仕様を作成し、出荷前の最終確認事項を明確にします。
5.出荷前テスト
加工や研磨、計測、積層、組み立て装置の単体での動作確認、ロボット単体の動作確認、その後システム全体での動作検証(出荷前テスト)を行います。ユーザー様にも一緒に組み上がったシステムを確認頂く為の立会検査を行います。立会検査が完了したロボットシステムは実際に稼働する場所に移送します。
6.総合テスト
出荷前検査(立会検査)が済んだロボットシステムを実稼働環境に搬入、据付・調整を実施、動作検証を行います。実稼働環境でも出荷前のテストと同じようにシステムが動作するか最終確認を行います。ロボットシステムを使った実生産をはじめる前に実際に、製造を行い動作確認をします。
7.保守サポート
ロボットシステム稼動後の運用時に最低限の日々の点検といった軽微なメンテナンスはお客様で行って頂き、定期点検、システム改善点等の修正、対策立案等定例会の実施を行います。
デジタルツイン/IOTの推進
弊社では、より付加価値の高い、より拡張性の高い、これからのFA環境にミートするロボットシステムインテグレーションを目指し、デジタルツイン/IOTの推進、イーサネットによるFA機器の接続を推進しています。
デジタルツイン
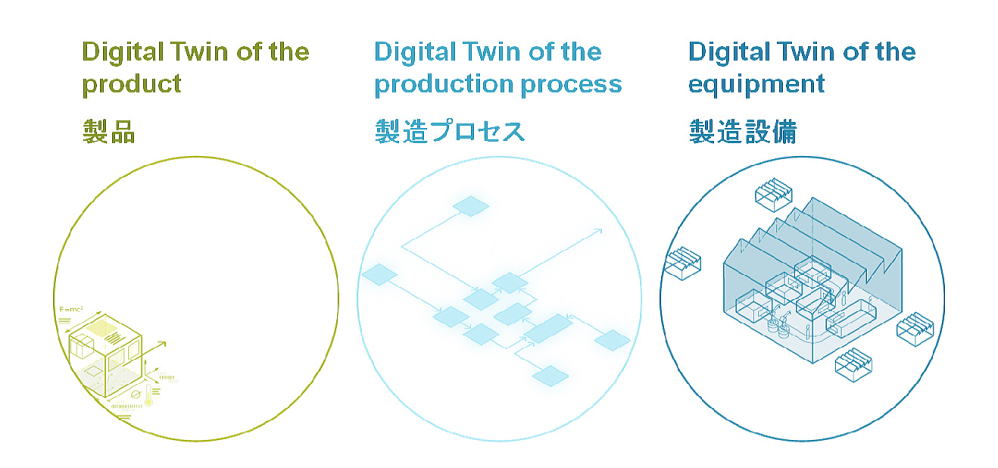
①工場や製品などに関わる物理世界の現象を、そのままデジタル上にリアルタイムに再現、実際に製造する製品、工場のラインや製品が出来上がるまでのプロセスを、システム上に表現したシミュレーション空間のこと。
②現実の工場や制御をデジタル世界と連動させ、管理を容易にする手法であり、次世代のものづくりにおける重要なコンセプトとである。またインダストリアル4.0を支える重要な技術である。
工業用イーサネット(産業用イーサネット)
工業環境に適用されるイーサネットのことで、強固なコネクタとケーブルで構成され高い確定性が要求されます。そうした確定性を実現するために、イーサネットと合わせて工業用イーサネット・プロトコルとして、PROFINET、EtherNet/IP、EtherCAT、CC-Link、Sercos
III、POWERLINK などがあり、10 Mbps ~ 1 Gbps のデータ転送レートを実現、一番良く使われているのは、100Mbpsです。工場設備(シーケンサ、ロボット、マシニング、計測器、FAライン設備等)をデジタル世界と連動させ、管理を容易にする手法であり、次世代のものづくりにおける重要なコンセプトとである。またインダストリアル4.0を支える重要な技術である。
1) PROFINETとは
ドイツのシーメンスとPROFIBUSのユーザー組織(PNO)によって開発され、IEC61158とIEC 61784で標準化されたEthernetベースの産業用ネットワークです。また世界で最も普及しているイーサネット(Ethernet)ベースの産業用ネットワークで、工場のフィールド機器、コントローラー間で高速かつ確実にデータ交換ができて、オフィスで利用されているイーサネットとも共存できます。また、安全信号も転送でき、ワイヤレスでも利用ができます。
2) EtherNet/IPとは
EtherNet/IPは、Ethernetを使用した産業用のマルチベンダネットワークです。伝送種類は10BASE-T/100BASE-TX、伝送速度は10/100Mbps、通信距離はノード間で100m以内、伝送ケーブルはSTPケーブル カテゴリ5/5e、接続方法は、スター、ライン、ツリー、最大接続台数は制限がありません。
3) EtherCATとは
EtherCATは、Ethernetを使用した超高速を実現するための動作原理とノード間で高精度に同期する機能などモーション制御に最適なアーキテクチャをもち、シンプルな配線形態を特長としているオープンなネットワークです。伝送種類は100BASE-TX、伝送速度は全二重100Mbps、通信距離はノード間で100m以内、伝送ケーブルはSTPケーブル カテゴリ5/5e、接続方法はスター、ライン、ツリーで、最大接続台数
65535です。
4) CC-LinkとCC-Link IE Fieldとは
オープンアーキテクチャネットワークとして1996年、三菱電機株式会社によって開発された。2000年、CC-Linkは、オープンネットワークとしてリリース、個別の自動化機器製造メーカーが製品をCC-Link互換として参入できるようになった。現在では数千のメーカーから販売される多くのCC-Link互換製品が利用できるようになった。CC-Linkには、バリエーションがあり、CC-Link,
CC-Link LT, CC-Link Safety, CC-Link IE (産業用イーサネット) - CC-Link IE Control
と CC-Link IE Fieldがある。パソコン、PLC、ロボット、サーボドライブ、モータードライブ、バルブマニホールド、デジタルおよびアナログ入力モジュール、温度調節器、マスフローコントローラと互換性がある。今では世界中でCC-Link対応機器が使われている。CC-Linkは、CC-Link
IE Fieldへ発展、超高速/簡単/シームレス/Ethernet規格への対応を実現、ギガビット&Ethernetフィールドレベルへグレードアップ、装置の制御データと管理データの混在に対応する、高速・大容量フィールドネットワークです。また、コントローラ分散、I/O制御、モーション制御、安全機能がシームレスに設定することも可能になっています。超高速ギガビット伝送とリアルタイムプロトコルにより、伝送遅れの少ないリモートI/O制御を実現します。制御データの高速通信とともに、デバイス管理用途などの情報もストレスのない通信を提供できます。
▷ページトップへ
ロボット架台・装置用アルミ架台・カバー付き柵の製作
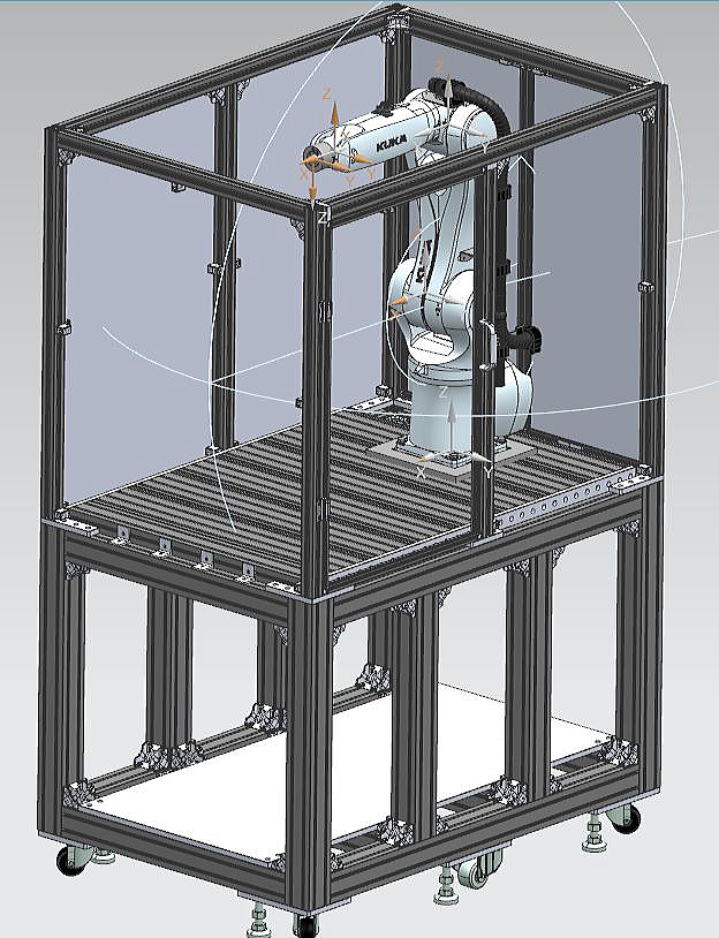
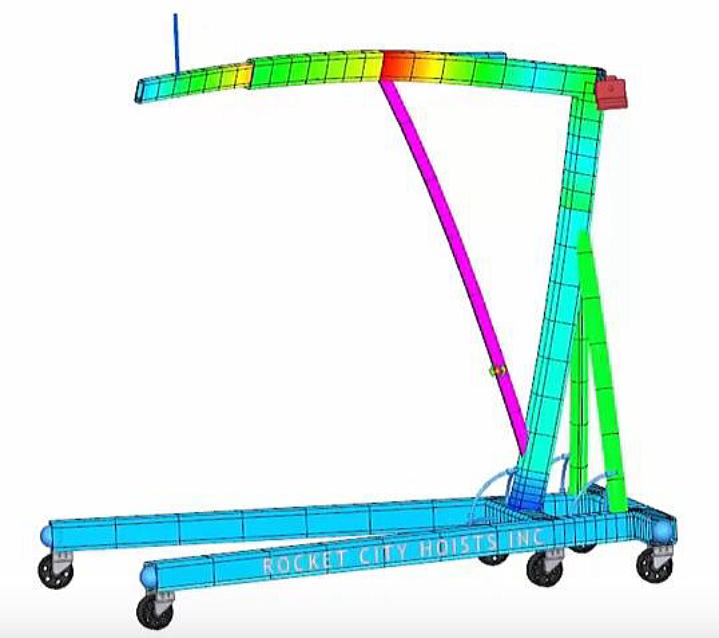
お客様のニーズ(導入目的)に合わせたロボット並びに装置用アルミ架台を高性能なアルミフレームを使って製作します。
<特徴>
・ロボット稼働(動作・振動)を考慮した最適設計
・構造解析を使った最適設計
・お客様での組み立て or 当社での組み立て等、選択可能
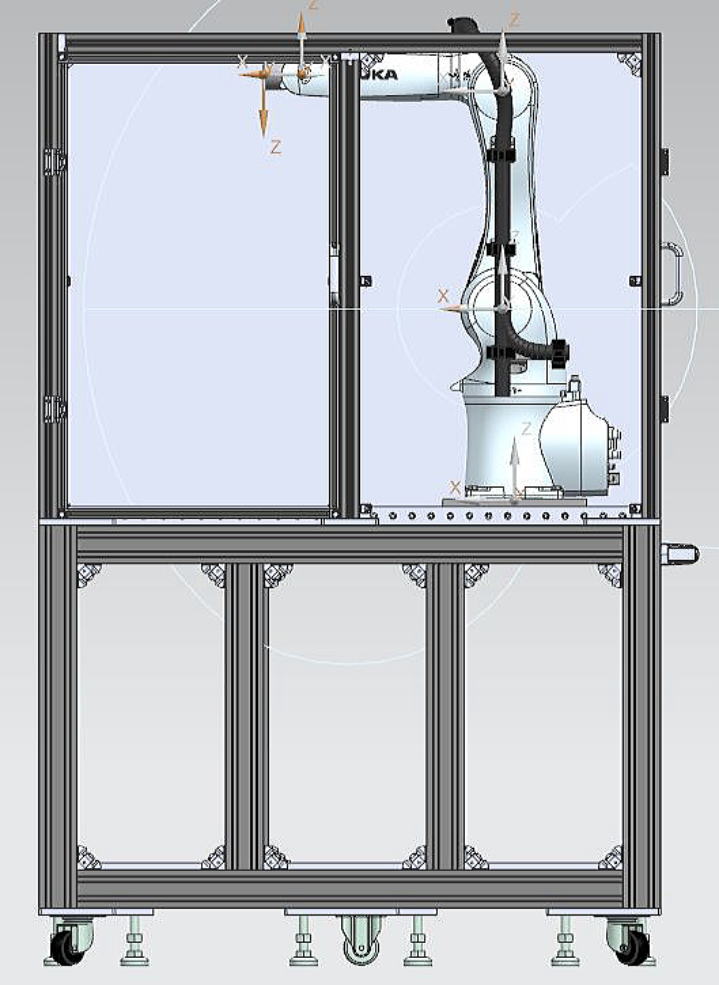
<こんなニーズにお応えします>
・追加変更や組み換えができる架台がほしい
・装置荷重に適したアルミ架台がほしい
・展示会等で見栄えの良い架台がほしい
・ライン装置を囲めるカバー付きの架台がほしい
・大型装置を囲めるカバー付きの柵がほしい
ロボットハンド製作・Additive Manufacturing 向け形状最適化提案
< ロボットハンド・グリッパー >
“



 【出典:株式会社日本HP『02.02 Jigs and Fixtures Japan V1.0E』(2019)】
< 形状最適化イメージ >
【出典:株式会社日本HP『02.02 Jigs and Fixtures Japan V1.0E』(2019)】
< 形状最適化イメージ >
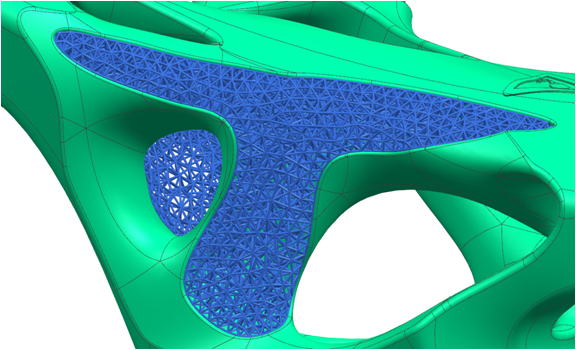
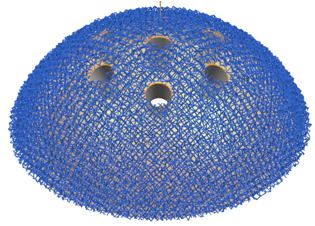
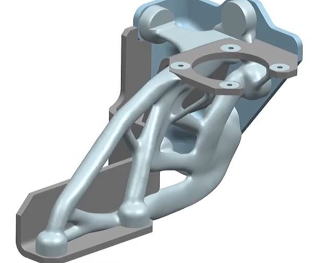
ロボットハンドやグリッパー等の構造と機構を一体設計し、材料特性が等方性にて出力可能な樹脂3Dプリンター(HP ZFusion)にて製作も致します。ご要望に応じてAdditive
Manufacturingに最適な形状のご提案も致します。
▷ページトップへ
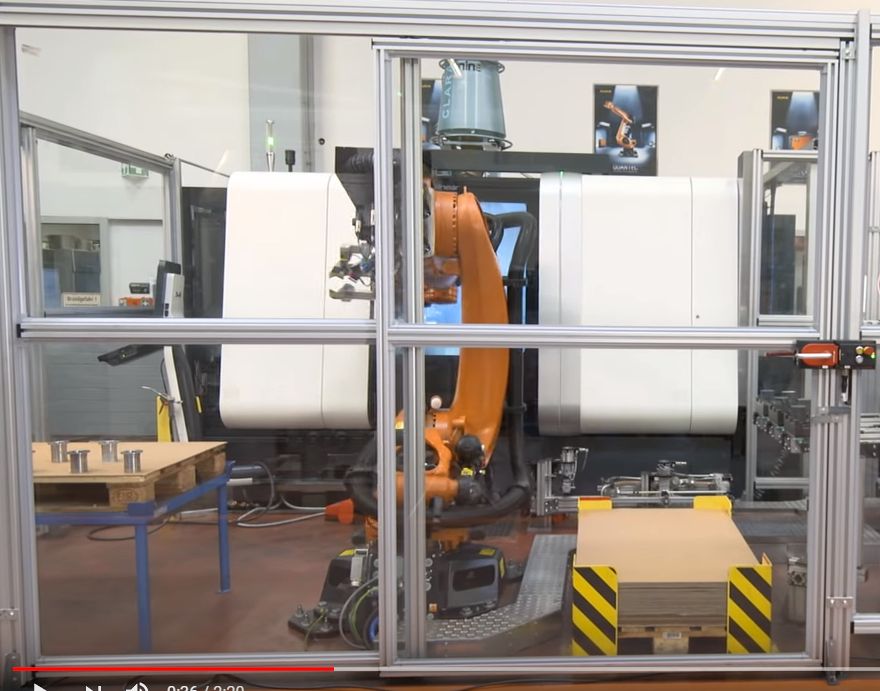
事例・実績
バリトリ、機械加工(軽切削)、アディティブマニファクチャリング、非接触測定、3Dスキャン
ハンドリング... etc
※ KUKA ロボットエンジニア&オペレータ 9人(パートナー様含む)

お問い合わせ先はこちら
▷ページトップへ
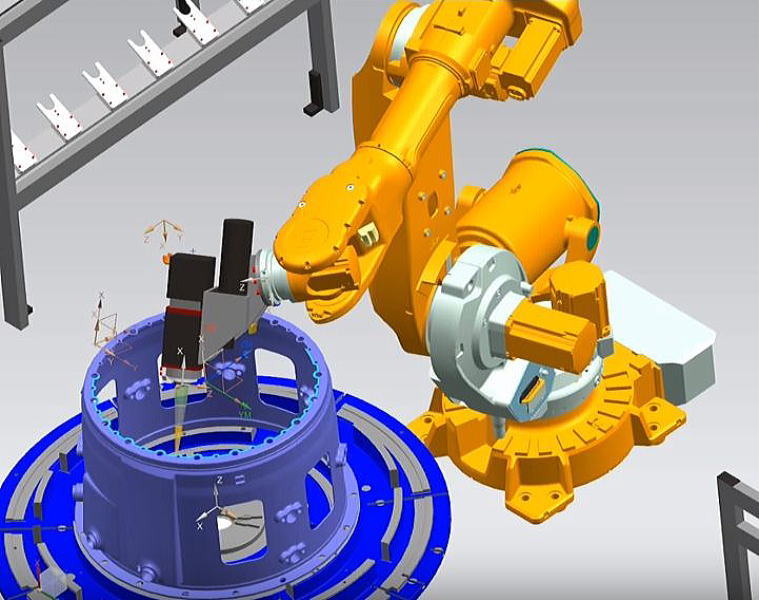
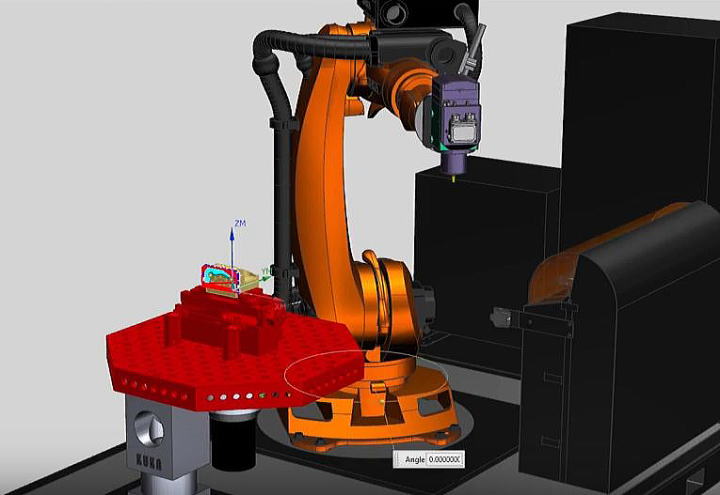

ロボットシステムインテグレーション
お客様が抱える課題の分析、ロボットを使った機械システム(動作プログラムや周辺設備)の企画、仕様定義、提案、構想(基本)設計から詳細設計、出荷テスト(総合テスト)、保守サポートまで対応致します。特に弊社が目指すロボットシステムは、生産準備からティーチングまでをCAD/CAM/CAE(3Dデジタルエンジニアリング)、3DロボットシミュレーションやIOTを駆使し、生産準備プロセスの効率化、ティーチングの自動化(オフラインティーチング)、周辺設備との連携実現を目指したシステム構築をパートナー様と共に構築致します
|
© 2012 BRAIN Co.,Ltd. All rights reserved.
|
|
|
|
株式会社ブレイン
福岡県北九州市小倉北区京町2-2-1 新小倉ビル本館3F